
20 Years of In-Vehicle Networking
Joseph Notaro, VP Worldwide Automotive Strategy and Business Development, ON Semiconductor.
www.onsemi.com
Vehicles are continually becoming more sophisticated and, if we look back 20 years or so, the changes are significant. Vehicles were primarily mechanical, with some hydraulic sub-systems for braking, while vehicle electronics were effectively limited to simple lighting circuits, ignition systems and battery charging. It was practicable to use a wiring harness to make direct connections between the (relatively few) electronic subsystems in the vehicle, and while some wiring harnesses were complex, the approach was manageable at that point in time.
Even when in-vehicle audio systems were first introduced, the wiring needs were relatively simple, comprising power and simple connections to speakers and antenna. Around the turn of the century, the amount of electronics in vehicles started to grow significantly, driven by technologies such as wheel sensors to assist with traction control and anti-lock braking (ABS) and crash sensors to deploy airbags. This led to the introduction of a new paradigm based on distributed / satellite electronic control units (ECUs).
Technology has continued to proliferate and highly reliable electronic systems have become key to the safety, efficiency and comfort of the vehicles we see on the road today. Many of the functions focus on aiding the driver to maintain control of the vehicle, through powered assistance delivered to the steering, braking, traction and torque systems. Several functions including electronic stability programs (ESP), electric power steering (EPS), active suspension, and ABS fall into this category. Less critical systems in vehicles such as lighting, windshield wipers, door locks, windows, sunroofs and increasingly sophisticated infotainment systems have also become electronically controlled, each with their own control module that needs to communicate with the other systems throughout the vehicle.
Recently, advanced driver assistance systems (ADAS) are being added to more vehicles, including those in the entry-level market segment. These sophisticated systems employ multiple highly sophisticated sensors to provide a wide variety of safety-related and convenience features.
For example, ADAS-enabling cameras provide additional functionality, such as a 360º view to assist with parking. Some high-end vehicles now have up to a dozen cameras. As these systems become more reliant on cameras to deliver safety-related functions, the demand for higher resolution is increasing, resulting in ever-increasing amounts of data that needs to be reliably and securely transmitted without any latency throughout the vehicle.
Clearly, the expansion of technology within vehicles would not have been possible if automakers had not moved on from the original wiring harness. Instead, they looked at methods of multiplexing and networking to improve connectivity while reducing the physical connections between systems.
In-vehicle networking (IVN) protocols
Even entry-level vehicles now contain dozens of ECUs, giving rise to hundreds, if not thousands, of signals that need to be routed around the vehicle. A wiring harness, with its associated connectors, capable of routing all of the power and data signals around a modern vehicle would now be so large, heavy, complex and expensive it would be impractical. In addition, each wire harness would be entirely customized to a single model within a family of vehicles. In-vehicle networking addresses these issues, but it comes with its own design considerations.
The requirements of ECUs and their associated systems differ widely, depending on the type of device and its function. Parameters such as speed and bandwidth, permissible jitter and response time (latency), and level of redundancy all vary significantly and have an impact on the connectivity requirements and, to some extent, the networking protocol used. For example, a forward-facing camera that forms part of an ADAS system is constantly transmitting significant amounts of highly critical data, while the sensor that provides fuel level information only transmits a simple data packet comparatively infrequently.
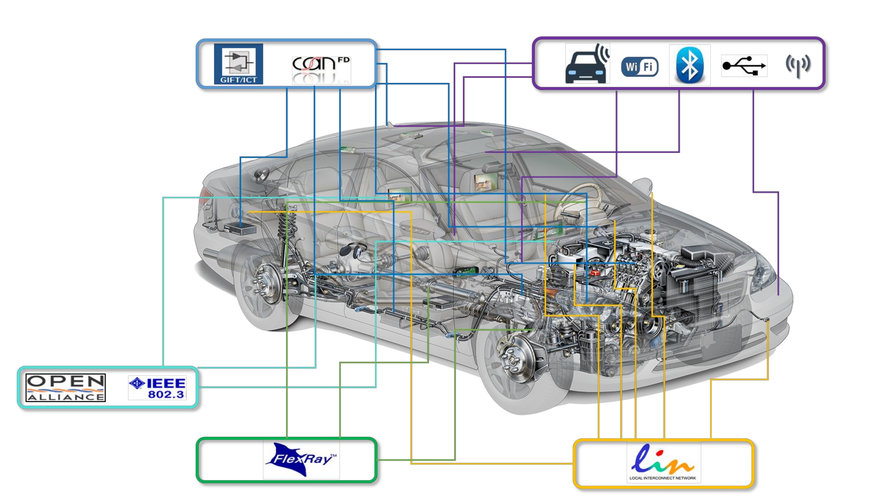
Over time, a number of different automotive networking solutions have evolved to match the growth in the data transmission requirements within vehicles.
- Local interconnect network (LIN): This is relatively low bandwidth, offering speeds up to 20 kbps, and therefore used primarily within subsystems where cost and simplicity are the primary drivers.
- Controller area network (CAN): This standard, developed by Robert Bosch GmbH during the 1980s and becoming an ISO standard in 1994, is the most widely used IVN with hundreds of millions of nodes being implemented each year. Offering speeds up to 1 Mbps, the primary usage is to connect ECUs to various sensors. CAN offers multiplexing features allowing sensors to be shared between one or more ECUs. CAN uses a simple pair of twisted copper wires and can reduce the number of wires required by up to 40% over the conventional wiring loom approach.
- FlexRay Communication Bus: As CAN became limited by its speed, the FlexRay protocol was developed to provide networking speeds up to 10 Mbps for applications such as drive-by-wire and steer-by-wire among others. The FlexRay protocol can accommodate multiple network topologies.
- Media oriented systems transport (MOST): This proprietary standard, developed to transport audio, video, voice and data signals, offers speeds up to 150 Mbps.
These protocols have continued to evolve to meet the changing (and more demanding) needs of modern vehicles. For example, Robert Bosch GmbH presented a new version of CAN at the International CAN Conference in 2012. This new incarnation, known as CAN FD, combines the core features of CAN with a higher data rate and larger data payloads.
Segmentation within IVN
In terms of network latency and responsiveness, different subsystems in a vehicle have different demands. This will influence the choice of IVN protocol used. For example, a steer-by-wire signal will have higher importance than a request to change the channel on the radio, and the network must be configured appropriately.
Often, a vehicle is divided into several domains that group different features, functionality and requirements. For safety, emissions and legislation reasons, two common domains - powertrain (control of engine and transmission) and chassis (control of suspension, steering and braking) - typically have 'hard real-time' response requirements. Engine control is instrumental in meeting regulations to control pollutants, such as particulate matter, as well as ensuring that the highest levels of energy efficiency are maintained. This level of control demands rapid sampling of sensors (in the order of milliseconds) and relatively high-power microcontrollers along with frequent data exchanges with other domains.
The chassis domain is critical to safety as this includes stability functions, ABS and, increasingly, steer-by-wire. The data requirements are similar to those for the powertrain domain, although the safety aspect introduces requirements that can best be addressed using time-triggered or deterministic networking techniques. Within the body domain there is a wide variety of functions including lights, windows, doors, climate control, windshield wipers and more. These functions tend to exchange relatively small packets of information between themselves, primarily to respond to inputs from vehicle occupants.
Telematics / Infotainment is an increasing significant aspect of vehicle communications, encompassing navigation systems, hands-free telephones, audio systems and remote diagnostics. This domain is not driven by time-sensitive messages but by multimedia data streams where signal integrity and data privacy are the most important constraints. As vehicles become more connected to one another and to the world around them, wireless communication and associated security is growing in importance here.
While powertrain, chassis, body and telematics are the four primary domains, the increase in safety functions such as impact sensors, airbag deployment, lane departure warning, adaptive cruise control (ACC) and driver monitoring are leading to the definition of a further domain, now commonly referred to as ‘active and passive safety’.
The future of IVN
The speed of the development and addition of functions in vehicles is challenging the capability of many existing networking protocols. Automakers are now looking to the electronics industry to identify protocols that will be capable of handling the current and future advances in automotive technology.
As vehicle complexity continues to increase and communications with other vehicles and surrounding infrastructure, such as smart cities, becomes common so the vehicle architecture will change. It is likely that Ethernet will become the dominant IVN technology, facilitating the transition from signal-based communications to service-oriented architectures.
Ethernet is often discussed as being a likely choice for the future of IVN, as it brings the potential for unification around a single networking standard throughout the vehicle. There are many advantages to Ethernet, not least that it is well established and understood, with a ready supply of components and the associated economies of scale. Available bandwidth is in the gigabit region, with 10 Gbps under development.
An issue with Ethernet as a solution for IVN is its latency, which makes it less suitable for safety-critical applications. However, new advancements such as 10BASE-T1S, which is a 10 Mbps collision free standard transmitted over a single twisted pair with inbuilt arbitration for node access, are now paving the way for the future of IVN technology.
Joseph Notaro is an accomplished technology industry executive with more than 25 years of experience in the semiconductor market. He has successfully lead R&D, business / market development and worldwide sales organizations. Joseph has extensive international experience across the Americas, Asia Pacific and Europe.
Currently, Joseph is the Vice President of WW Automotive Strategy and Business Development at ON Semiconductor. In this role, he leads the automotive strategic marketing group responsible for defining company strategy addressing the automotive end-market working closely with the Executive team and Business Units. He has participated in several acquisitions, supports the company’s annual strategic planning process and is leading the Automotive OEM Business Development teams.
Prior to joining ON Semiconductor, Joseph has held various management and executive positions in Fairchild and STMicroelectronics.
www.onsemi.com
