
www.industryemea.com
17
'20
Written on Modified on
Innovations in SCARA Robots Boost Performance and Reliability
By Yamaha Motor Europe Factory Automation Section.
SCARA robots can automate and accelerate pick-and-place and small assembly processes such as transferring workpieces between processes, screwdriving, and dispensing. They can also perform functional testing such as activating buttons.
Like any process-automation technology before them, robots must deliver value by increasing productivity and reducing costs for their owners. Any industrial project must keep a careful eye on speed and tact time, as well as accuracy, repeatability, and reliability, to ensure a satisfactory return on investment.
At the same time, the features and performance of SCARA robots are moving forward. New designs let smaller robots tackle larger jobs and achieve high excursion speeds to keep tact time low. Vision systems have become plug-and-play, simplifying integration and allowing easier programming. In addition, new features that reduce mechanical wear and simplify maintenance are being introduced. We can examine these developments by looking under the covers of today’s SCARA robots.
Motion and Balance
Innovations to improve control over the motion of the tip help to increase both speed and positional accuracy. Pick and place processes demand well controlled vertical, or z-axis, movement as well as rotational, or R-axis, movement.
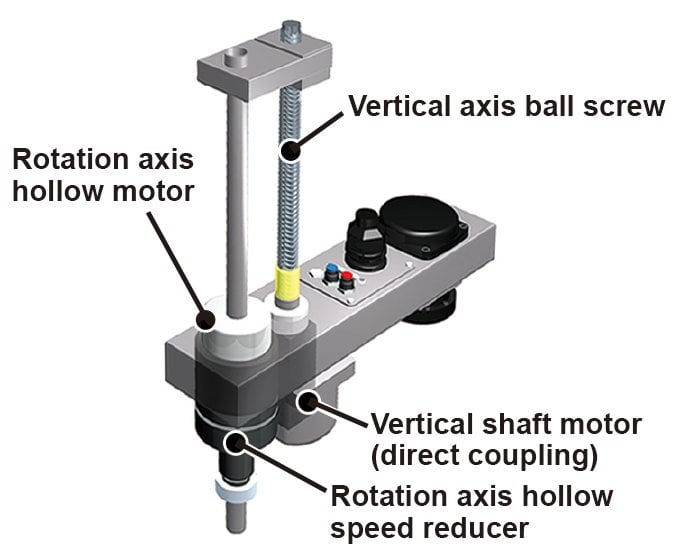
Traditionally, z-axis motion is handled using a lead screw driven by the vertical shaft motor, while the R-axis is belt-driven from the rotary shaft motor. Both belt drives can be replaced by direct drives that eliminate aging and the risk of breakage or stretching of the belts, resulting in superior long-term accuracy and reduced maintenance. Yamaha developed a direct ball-screw drive mechanism for beltless z-axis control, leveraging its experience with single-axis robots, as well as a combined hollow motor and coaxial speed-reduction gear that delivers several advantages for R-axis motion control (figure 1).
In addition to enabling accurate, long-lasting beltless drive, the hollow motor and reduction gear allow higher R-axis rotational speeds with heavy payloads that have a large offset. Unlike a conventional belt driven R-axis, which must decelerate when positioning loads that have a large moment of inertia, the beltless drive can tolerate a higher moment of inertia because the tip-rotation axis is directly in line with the speed reduction gear.
In addition, optimisation of driving-gear ratios help achieve the fastest possible rotational speed and x-y motion throughout the working area of the machine, resulting in lower cycle times. This is especially important for processes that involve transferring objects over large distances.
Current SCARA robots featuring beltless drive cover sizes up to about 1200mm arm length and about 50kg maximum payload. Smaller models down to about 120mm and 1kg maximum payload allow users to configure high-performing space-efficient assembly cells that occupy a small factory area.
Where factory space is especially tight, ceiling-mounted orbital SCARA robots can reach any location within the work envelope below (figure 2) allowing extra freedom to minimise the process footprint.
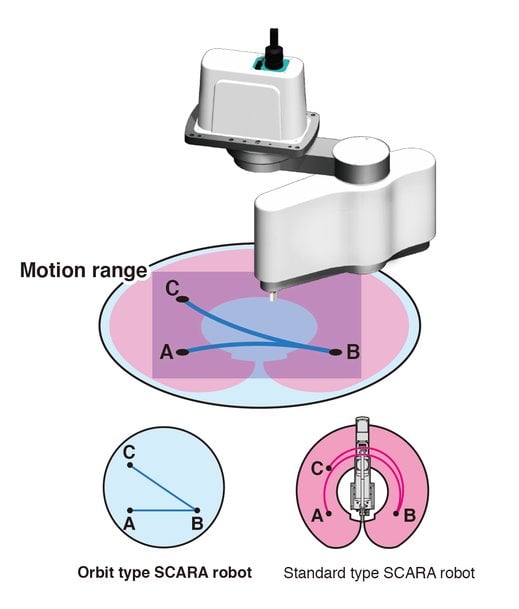
Figure 2. Optimally balanced orbital SCARA robots combine high speed with space savings.
With orbital SCARA robots, optimal weight balance is key to achieving high excursion speeds with a large payload capability. Yamaha utilises lightweight materials and leverages its hollow motor and gear knowhow, combined with optimised internal motor positioning, to achieve a standard cycle time for moving a 1kg load 300mm horizontally and 25mm up/down to just 0.29 seconds, which is about 36% faster than preceding models. The maximum payload is 5kg.
A further advantage coming from superior balance and lower inertia is a reduction in stresses exerted on the mounting frame that must be installed to carry the robot. This allows a lightweight, simplified design that saves cost and eases installation in the factory.
Innovations for Uptime
Long-term positioning accuracy and immunity to environmental contaminants such as moisture, dust, and grease can be enhanced by replacing optical encoders with magnetic resolvers for position sensing. Magnetic resolvers are inherently immune to shocks and electrical noise that can interfere with optical encoders. The magnetic resolver benefits from simple construction with minimal electronic components, ensuring greater reliability and high-temperature performance.
In addition, careful attention to simplifying maintenance can have a valuable effect on increasing equipment uptime. Designing panels for easy removal without needing to detach wiring or pipework allow essential servicing or repairs to be completed quickly. In addition, the latest long-life grease formulas eliminate time-consuming disassembly and lubrication for the lifetime of the equipment.
Plug-and-Play Vision
Adding vision expands the range of functions the robot can perform to include searching for workpieces and correcting for position deviations. Historically, machine vision has been controlled separately from the robot, requiring specialist vision knowledge to program the vision system and utilise the data in robot instructions. The latest vision systems eliminate this barrier, integrating vision within the robot program to enable plug-and-play operation and greatly reduced startup time. Communication lag between the vision and robot systems is also eliminated. Yamaha’s iVY2 vision system and RCX340 controller further enhance performance with innovations such as a new CTMOVE command that executes a complete conveyor-tracking cycle from start position to component pickup, which replaces three separate instructions to enable pick and place at up to 100cpm.
Special Requirements
Finally, novel configurations can be considered to satisfy special requirements. Inverse type SCARA robots are specially designed to raise the workpiece from below, which prevents contamination by falling particles such as dust or moisture that may gather on the surface of the robot. Clean-room SCARA robots are also available, benefiting from beltless operation that eliminates contaminants due to belt deterioration and featuring built-in suction at the rear of the machine to prevent dust emission.
Conclusion
SCARA robot design is improving in many subtle ways, all the way from the rotary tip to the controller interface, to increase performance, speed and reliability, enabling higher productivity and faster return on investment.
www.yamaha-motor-im.eu
